Chaoyi Xu
WeChat: 13915930090
About Me
I am an incoming PhD student at the School of Computer Science, Peking University (Fall 2026).
Currently, I am actively exploring various research directions that interest me at BeingBeyond, a startup, where I am fortunate to be advised by Prof. Zongqing Lu, where I am also working closely with Haoqi Yuan.
Previously, I was a research intern at PKU EPIC Lab and Galbot, where I was fortunate to be advised by Prof. He Wang.
During my time there, I worked closely with Gireesh Nandiraju and Jaylon Wang.
I may have started from the bottom, but now I’m… well, still on my way up (slowly) ! And I really enjoy the journey on this (tough) way.
I also play basketball and hit the gym a lot (but not really since becoming a research intern).
I have extensive experience collaborating with international teams, am fluent in English, and am enthusiastic about connecting with peers for academic exchange, as well as exploring new research and career opportunities. It would be my great honor to treat you to a coffee or a beer for an engaging face-to-face conversation! ☕🍻
News
I am hiring self-motivated students for well-paid internships in mobile dexterous manipulation and embedded systems, hosted at BeingBeyond. If you’re interested, especially as an international student, feel free to contact me!
Publications
-
 ICASSP 2025
ICASSP 2025
-
 ICRA 2025
ICRA 2025
-
 IROS 2024
Code Project PageOral Presentation at IROS 2024
IROS 2024
Code Project PageOral Presentation at IROS 2024
Oral Presentation at CVPR 2024 @ VLADA
Spotlight Presentation at ICRA 2024 @ 3D Manipulation
 arXiv 2025
arXiv 2025

 arXiv 2025
arXiv 2025

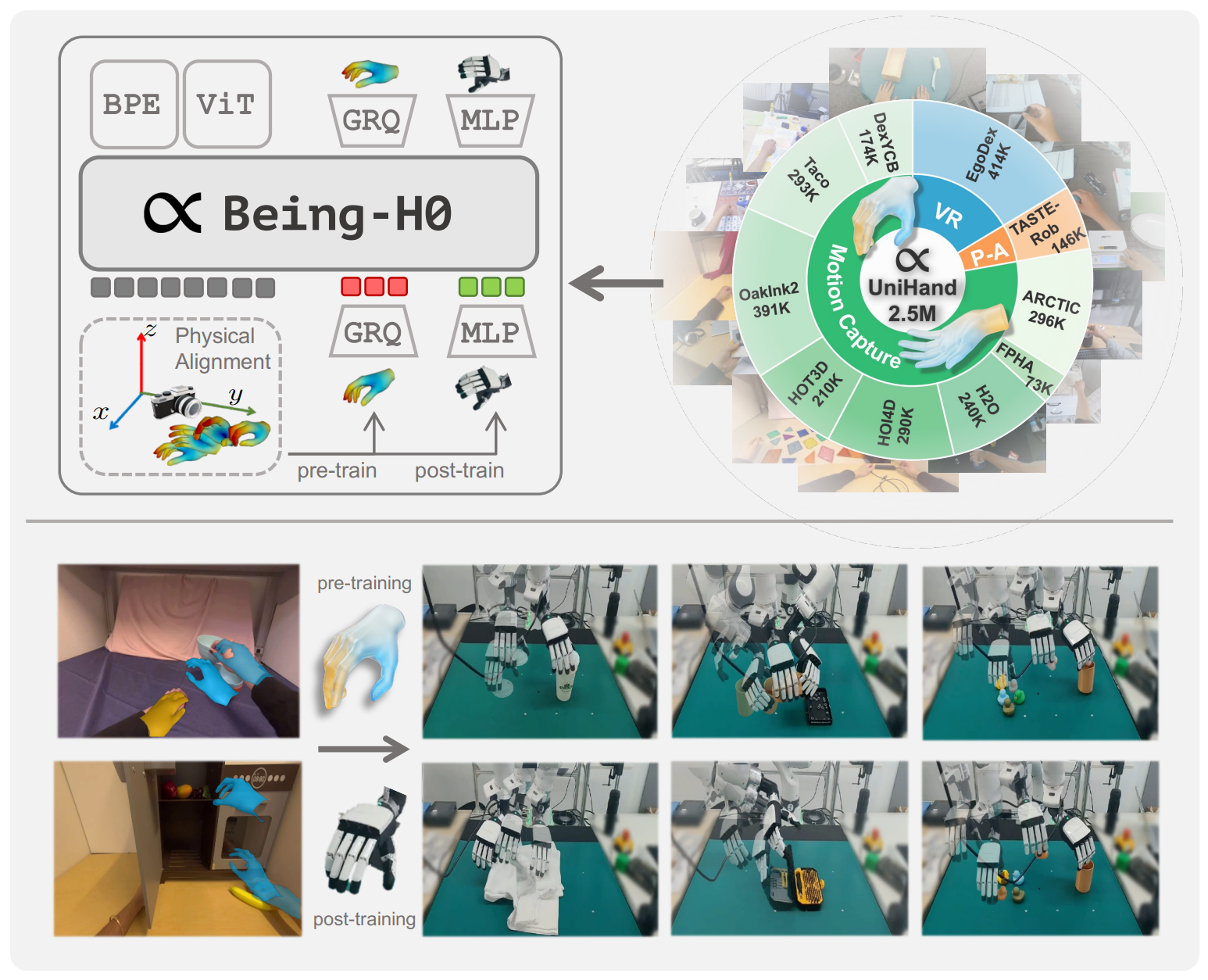 arXiv 2025
arXiv 2025

 RSS 2025
RSS 2025

 ICCV 2025
ICCV 2025


 ICRA 2024
ICRA 2024

 arXiv 2024
arXiv 2024

Projects
-
 Time: 2025Overview: I built the world’s first desktop robotic system combining dexterous hand, robotic arm, and active vision — built for seamless integration with advanced embodied AI algorithms.
Time: 2025Overview: I built the world’s first desktop robotic system combining dexterous hand, robotic arm, and active vision — built for seamless integration with advanced embodied AI algorithms. -
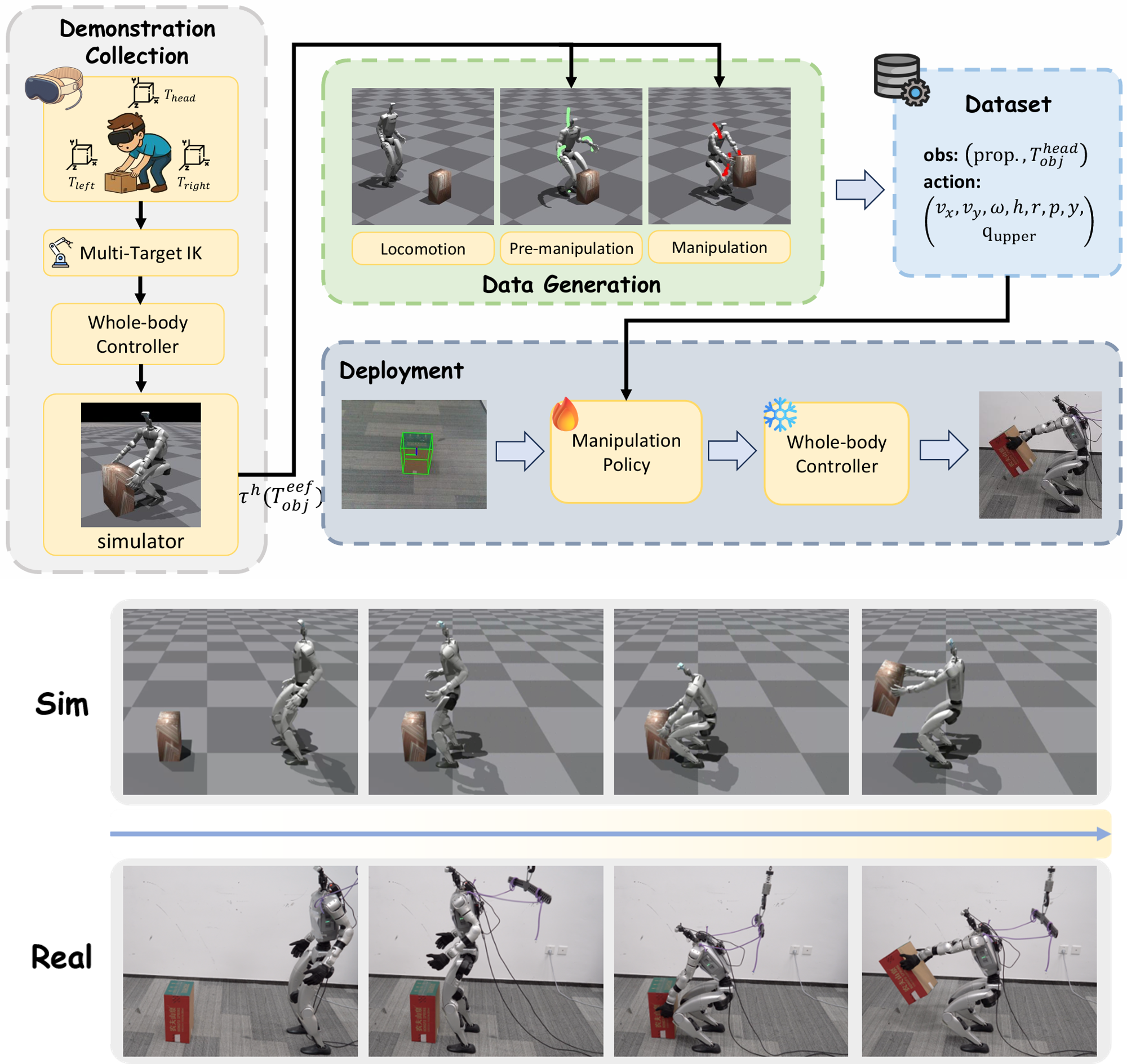
 Time: 2025Overview: Built a full-body humanoid teleoperation system by integrating the Homie exoskeleton with a custom 2-DOF head. The system enables real-time mapping of human upper-body motion to a humanoid robot, supporting head-aligned visual feedback and intuitive control.
Time: 2025Overview: Built a full-body humanoid teleoperation system by integrating the Homie exoskeleton with a custom 2-DOF head. The system enables real-time mapping of human upper-body motion to a humanoid robot, supporting head-aligned visual feedback and intuitive control. -
 Time: 2025Overview: Built in just one week during a hackathon, this is my first fully self-developed desktop dual-arm companion robot. It supports grasping, navigation, visual tracking, and a full speech pipeline (ASR & TTS), powered by an emotionally aware agent framework.
Time: 2025Overview: Built in just one week during a hackathon, this is my first fully self-developed desktop dual-arm companion robot. It supports grasping, navigation, visual tracking, and a full speech pipeline (ASR & TTS), powered by an emotionally aware agent framework. -
 Time: 2025Overview: A reproduction of the open-source GELLO project for real-time teleoperation of the Franka robot. The system ensures sim-to-real synchronization, enabling real-time collision and safety monitoring in simulation before execution in the real world.
Time: 2025Overview: A reproduction of the open-source GELLO project for real-time teleoperation of the Franka robot. The system ensures sim-to-real synchronization, enabling real-time collision and safety monitoring in simulation before execution in the real world. -
 Time: 2025Overview: A teleoperation system leveraging smartphone sensor signals. Motion sensors control the end-effector's orientation, while on-screen buttons manage translation, enabling an intuitive control experience.
Time: 2025Overview: A teleoperation system leveraging smartphone sensor signals. Motion sensors control the end-effector's orientation, while on-screen buttons manage translation, enabling an intuitive control experience. -
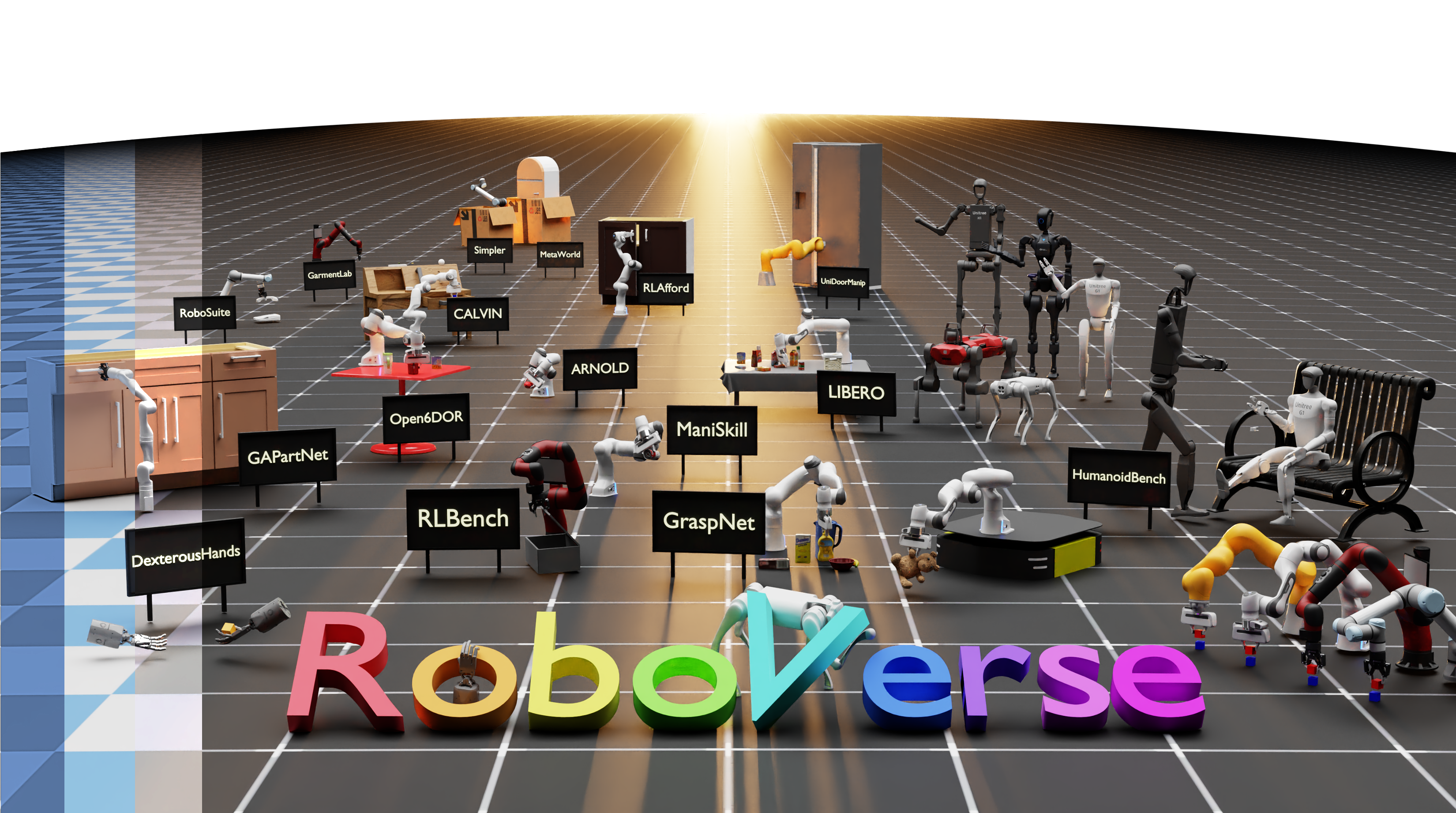
 Time: 2023Overview: Simulately is a project where we gather useful information of robotics & physics simulators for cutting-edge robot learning research.Open-source Project
Time: 2023Overview: Simulately is a project where we gather useful information of robotics & physics simulators for cutting-edge robot learning research.Open-source Project
Selected into CMU 16-831
-
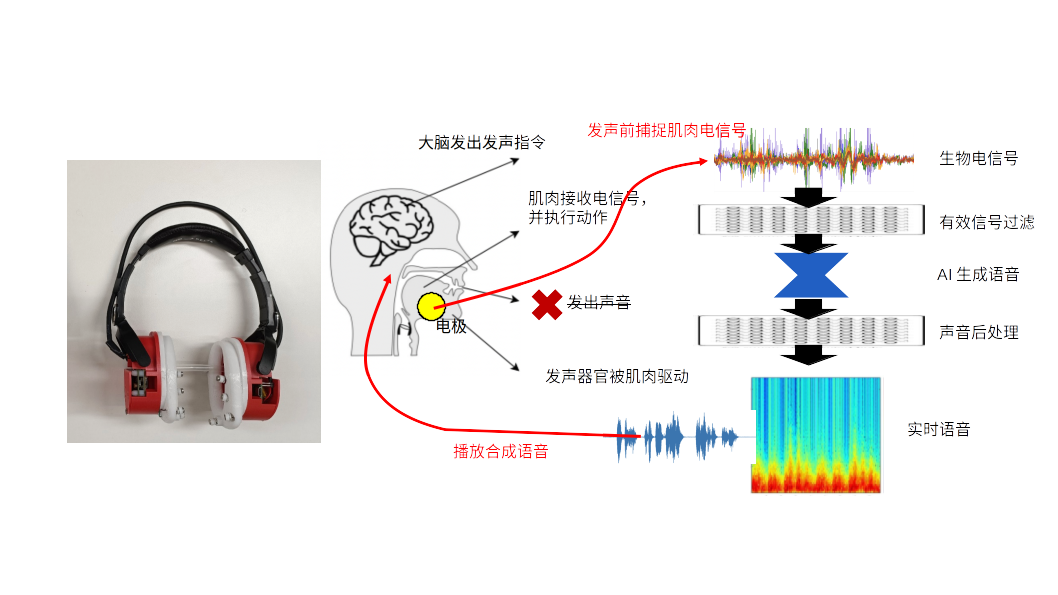 Time: 2022Overview: A facial EMG signal acquisition device designed for ALS patients to capture muscle activity during speech and an algorithm to reconstruct speech from EMG signals.
Time: 2022Overview: A facial EMG signal acquisition device designed for ALS patients to capture muscle activity during speech and an algorithm to reconstruct speech from EMG signals. -
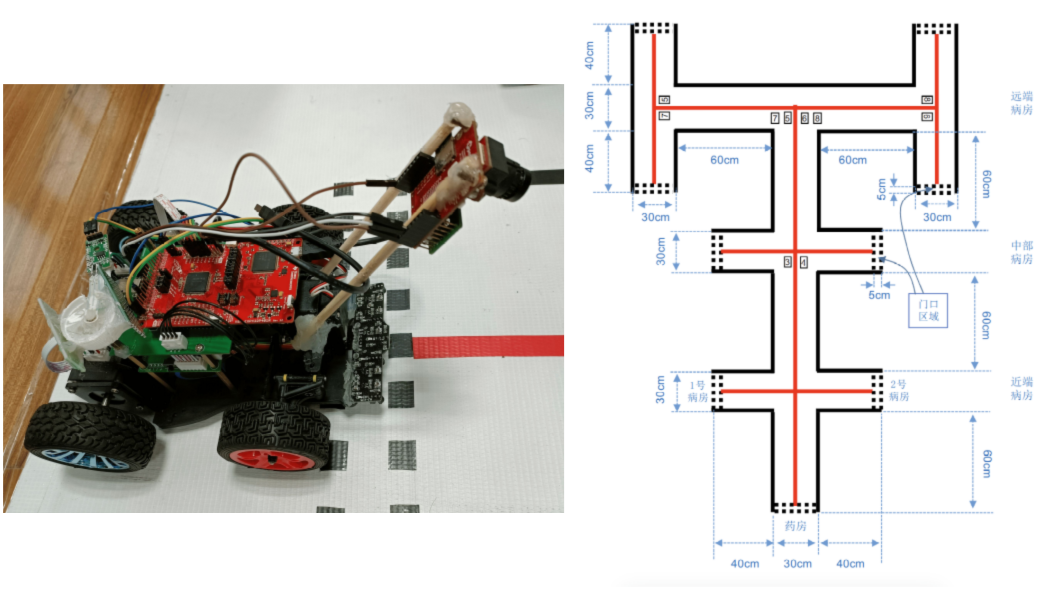 Competition: Jiangsu Division of 2021 National College Students Electronic Design Competition of TI CupAward: First PrizeOverview: An autonomous robot with visual line tracking, ward number recognition, load detection, and automatic round-trip navigation for medicine delivery between hospital pharmacy and wards.
Competition: Jiangsu Division of 2021 National College Students Electronic Design Competition of TI CupAward: First PrizeOverview: An autonomous robot with visual line tracking, ward number recognition, load detection, and automatic round-trip navigation for medicine delivery between hospital pharmacy and wards. -
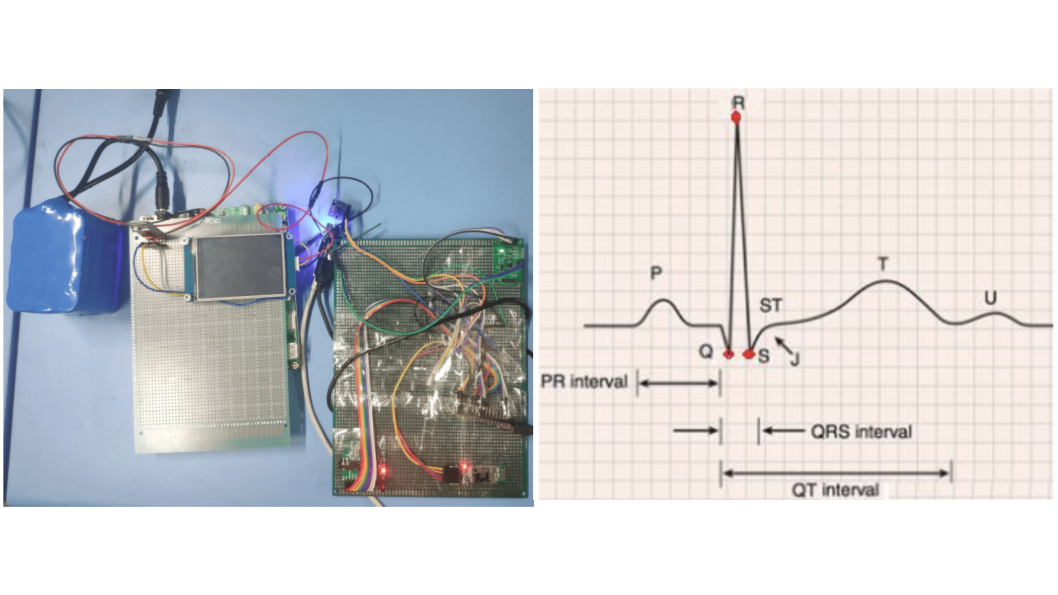 Competition: 2020 Jiangsu TI Cup College Student Electronic Design CompetitionAward: First PrizeOverview: A wireless motion sensor node using the ADS1292 and LMT70 chips for real-time ECG, temperature, and motion tracking, with low-latency data transmission to mobile devices.
Competition: 2020 Jiangsu TI Cup College Student Electronic Design CompetitionAward: First PrizeOverview: A wireless motion sensor node using the ADS1292 and LMT70 chips for real-time ECG, temperature, and motion tracking, with low-latency data transmission to mobile devices.
Experience



Powered by Jekyll and Minimal Light theme.
Thanks for stopping by! 😊